製品情報
WRIST COMPLIANCER位置誤差修正装置
組立てられる部品間の水平方向の誤差を修正

組立てられる部品間の水平方向の誤差を修正

Remote Center Complianceの考え方は1977年に米国M.I.T.のChares Stark Draper研究所(マサチューセッツ州)において開発されました。この機構の特長は、はめ合いにおける部品間の水平方向の誤差と角度方向の誤差をおのおの独自に、連成することなく、修正することにあります。この原理をシャフトを穴に挿入する例で説明します。
(a)シャフトと穴に水平方向の誤差がある場合、穴に面取りがしてあればシャフト先端に水平方向の分力が作用します。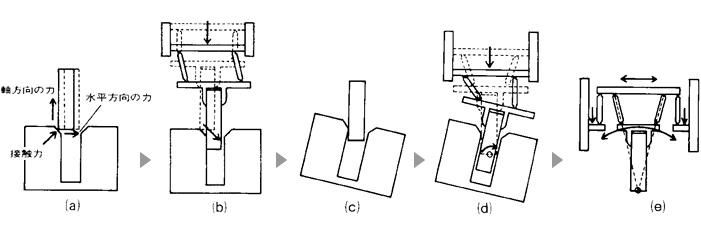
© Copyright 2018 BL AUTOTEC, Ltd.All Rights Reserved.



