| 项目目/型号(产品编号) | LUR-111 | LUR-112 | LUR-113 | LUR-211 |
| 允许载荷 | 压缩方向 N(kgf) | 1274(130) | 490(50) | 1274(130) | 1274(130) |
| 拉伸方向 N(kgf) | 137(14) | 137(14) | 225(23) | 137(14) |
| 可搬运重量(参考)※2 N(kg) | 49(5) | 49(5) | 88(9) | 49(5) |
| L寸法 mm | 107 | 60 | 55 | 163 |
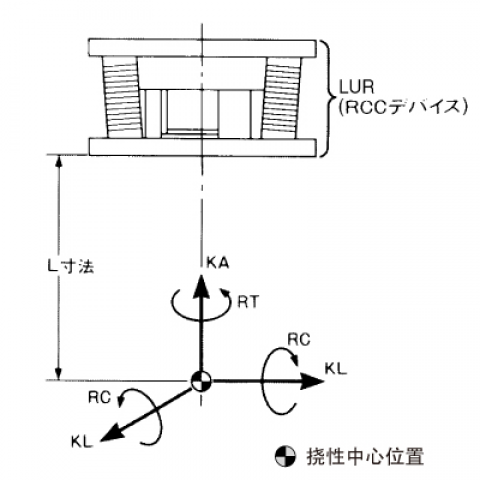
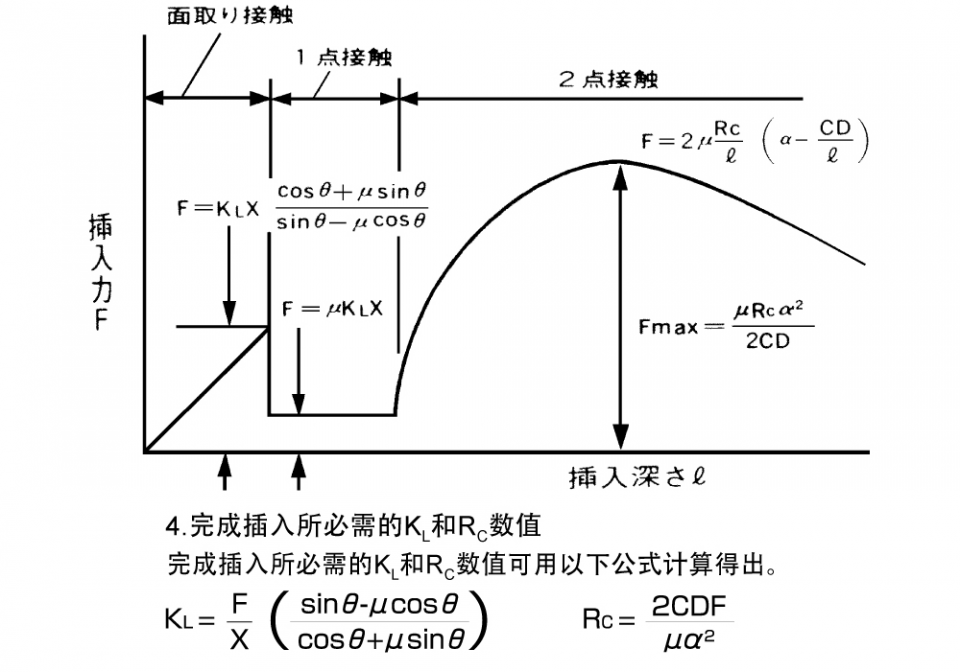
| 各方向刚性 | KL:水平(X・Y)方向kgf/cm | 13.2 | 7.6 | 26.8 | 17.9 |
| RC:角度(θ)方向kgf・cm/rad | 4,110 | 1,830 | 6,220 | 4,720 |
| KA:軸(Z)方向kgf/cm | 2,480 | 900 | 2,990 | 3,210 |
| RT:旋转(α)方向kgf・cm/rad | 39 | 29 | 105 | 86 |
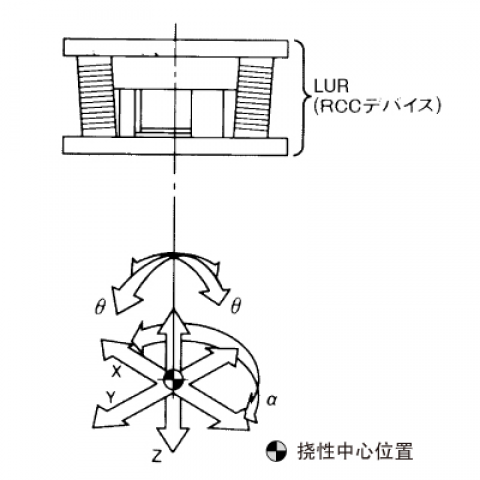
| 误差修正值量 | 水平(X・Y)方向 mm | ±2 |
| 角度(θ)方向 deg | ±1° |
| 軸(Z)方向mm | ±0.5 |
| 旋转(α)方向 deg | ±6° |
| 产品重量 g | 270 | 380 |
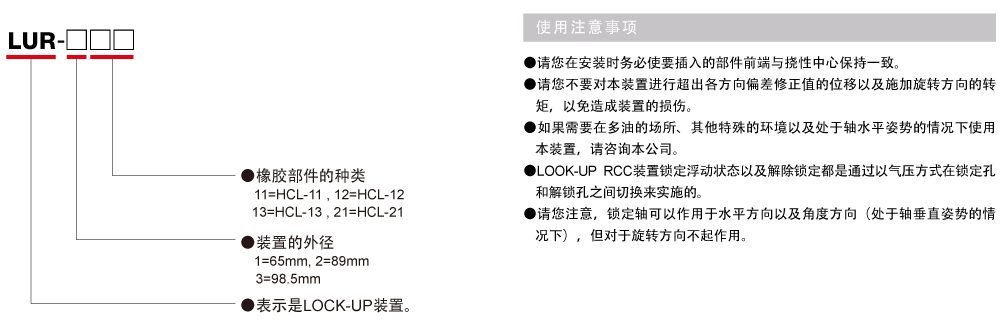
| 锁紧机构 | 锁定轴 | 水平方向以及角度方向(处于轴垂直姿势的情况下) |
用于锁定
的气压孔 | M3×1本 |
用于解锁
的气压孔 | M3×1本 |
| 作用气压值 Mpa(kgf/cm2) | 0.39〜0.68 (4〜7) |
| 锁定时的重复精度 mm | ±0.1(在轴垂直姿势无负荷的情况下) |
| 使用温度、湿度范围 | 0~55℃、0~90%(无结露) |
| 仕様モデル | LUR-212 | LUR-213 | LUR-321 |
| 允许载荷 | 圧縮方 N(kgf) | 490(50) | 1274(130) | 2646(270) |
| 引張方向 N(kgf) | 137(14) | 225(23) | 264(27) |
| 可搬运重量(参考)※2 N(kg) | 49(5) | 88(9) | 98(10) |
| L寸法 mm | 114 | 107 | 160 |
| 各方向刚性 | KL:水平(X・Y)方向kgf/cm | 9.8 | 30.4 | 32.1 |
| RC:角度(θ)方向kgf・cm/rad | 2,760 | 7.600 | 20,700 |
| KA:軸(Z)方向kgf/cm | 1,340 | 3,210 | 5,360 |
| RT:旋转(α)方向kgf・cm/rad | 63 | 240 | 310 |
| 误差修正值量 | 水平(X・Y)方向 mm | ±2 |
| 角度(θ)方向 deg | ±1° |
| 軸(Z)方向mm | ±0.5 |
| 旋转(α)方向 deg | ±6° |
| 产品重量 g | 380 | 560 |
| 锁紧机构 | 锁定轴 | 水平方向以及角度方向(处于轴垂直姿势的情况下) |
用于锁定
的气压孔 | M3×1本 |
用于解锁
的气压孔 | M3×1本 |
| 作用气压值 Mpa(kgf/cm2) | 0.39〜0.68 (4〜7) |
| 锁定时的重复精度 mm | ±0.1(在轴垂直姿势无负荷的情况下) |
| 使用温度、湿度范围 | 0~55℃、0~90%(无结露) |
備考
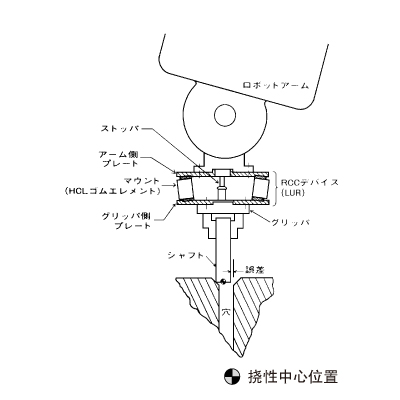
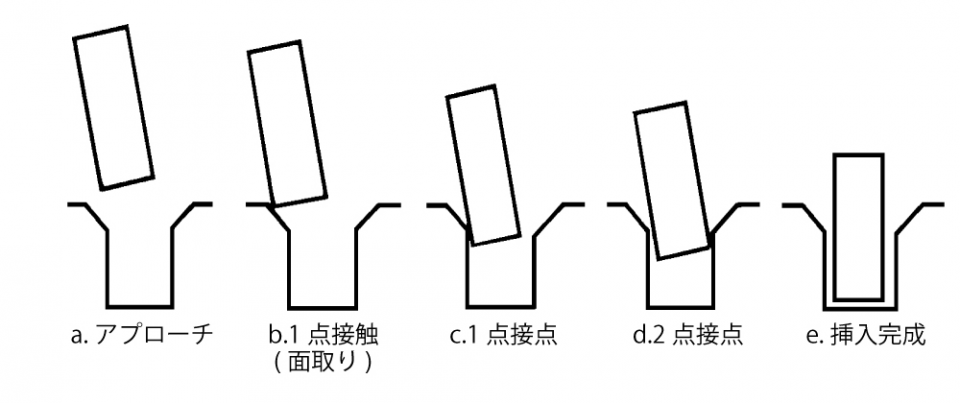
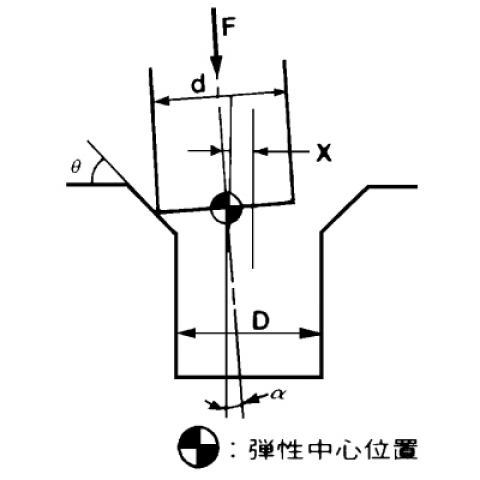
1.L尺寸是指从末端接头安装面到挠性中心位置的距离。请您在使用时务必使作用点(轴插入时接触点)与挠性中心一致。
2.上述的刚性数值是在挠性中心位置的数值。
3.上述误差修正量是单一方向的最大修正量,并不是与其他方向合成的修正量。
4.角度方向偏差的修正值仅适用于在挠性中心位置进行插入作业的情况。
5.板和挡板的材质是铝。
6.本锁紧机构不保持上述的各方向刚性力。抑制RCC设备在移动时的跳动的设备。