Product information
QUICK-CHANGE
Exchange robots and machines hands and tools automatically

Exchange robots and machines hands and tools automatically




Assembly
・sertion of bearing into housing ・LSI inspection equipment ・Alternators ・Insertion of gear into pline shaft ・PCB
Non-assembly
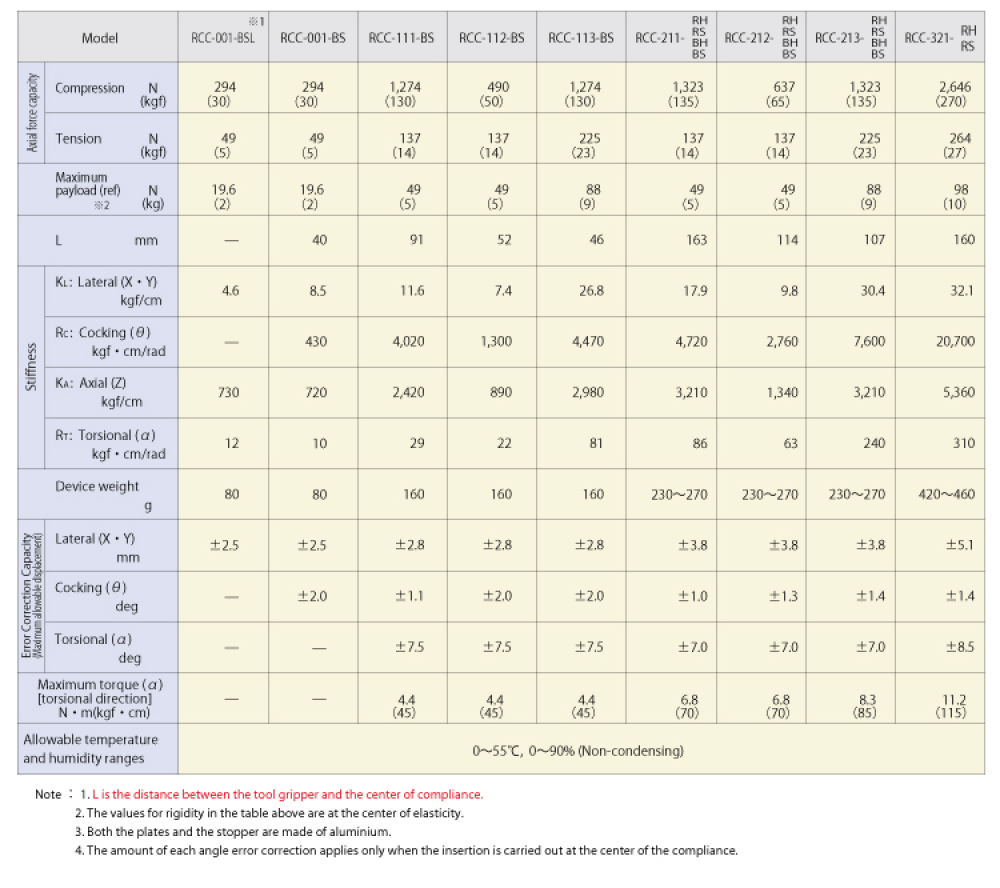
Guide to Model Selection
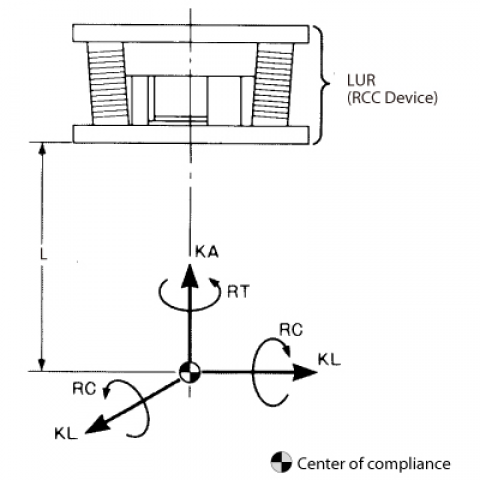
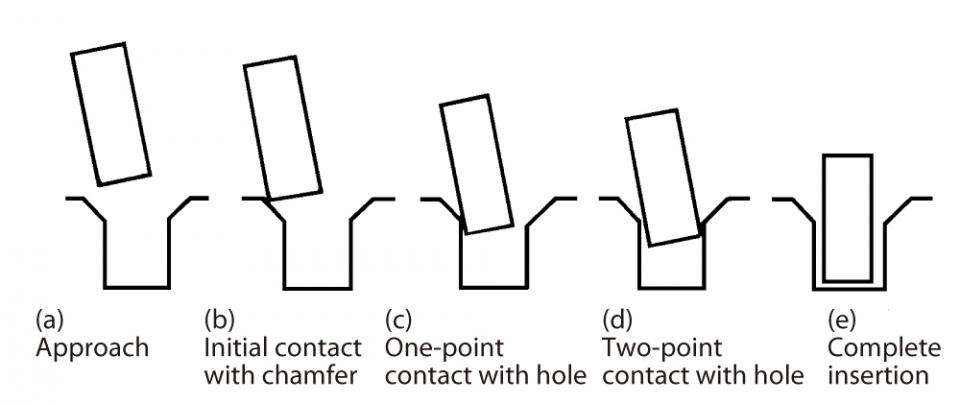
Lateral stiffness (KL) and cocking stiffness (RC) are the two most important properties in selecting a suitable device. The values KL and RC required for correct assembly can be determined using the basic principles of dynamics. The following example of the insertion of a shaft into a hole demonstrates the significance of the values KL and RC.
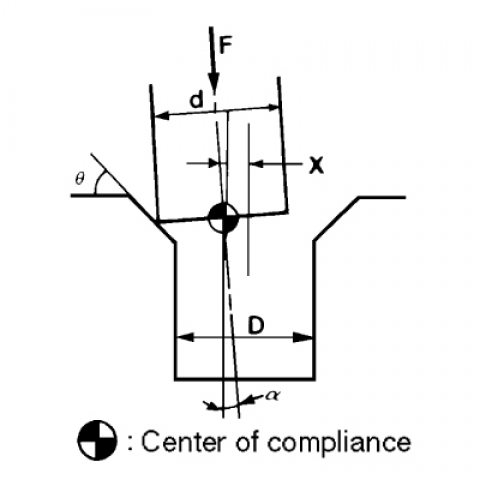
F: Insertion force (kgf)
X:Lateral misalignment (cm)
α:Cocking misalignment (rad)
D:Hole diameter (cm)
d:Shaft diameter (cm)
μ:Coefficient of friction
θ:Chamfer angle (deg)
C:Clearance ratio (D-d)/D
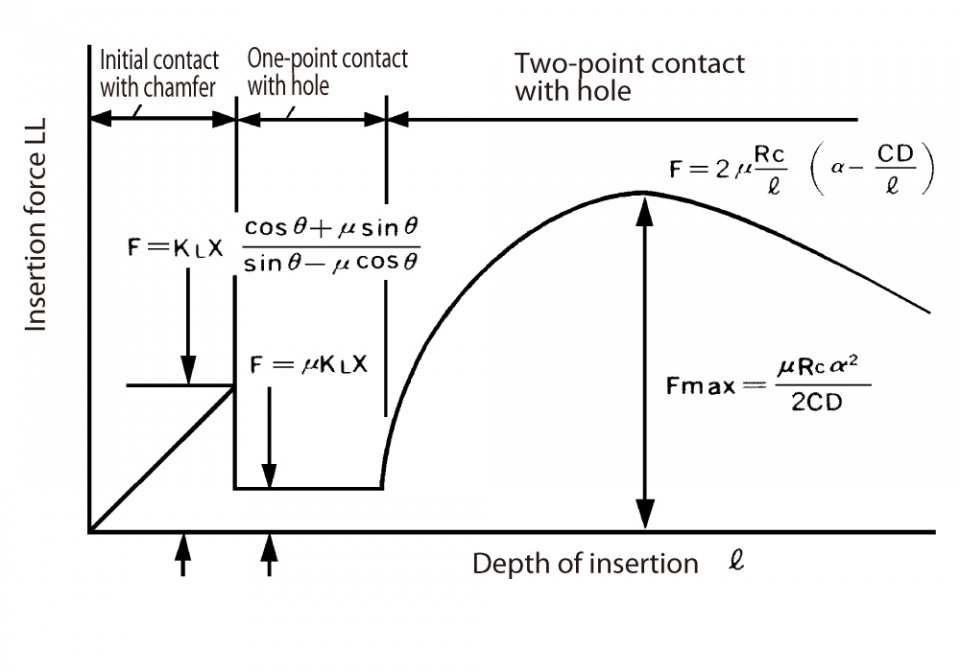
※Complete insertion can only be achieved if the selected device has actual values for KL and RC which
are less than the theoretical values calculated using the equations above.
Taking this into consideration, as well as other factors such as dimensions and weight, choose the most suitable model
for your requirement.
© Copyright 2018 BL AUTOTEC, Ltd.All Rights Reserved.